PROJECT: AUTONOMOUS ROBOT LIBRARIAN
OVERVIEW:
Developed a fully functioning robot librarian which sorts books onto corresponding shelves based on the colour scanned on the spine (genre). Using SolidWorks, RobotC, and rapid prototyping techniques such as 3D printing.
SKILLS:
Robotics, AI, Navigation, Computer Vision, System Integration
DEMO:
WATCH DEMODOCUMENTATION:
TECHNICAL REPORTMECHANICAL DESIGN AND PROTOTYPING
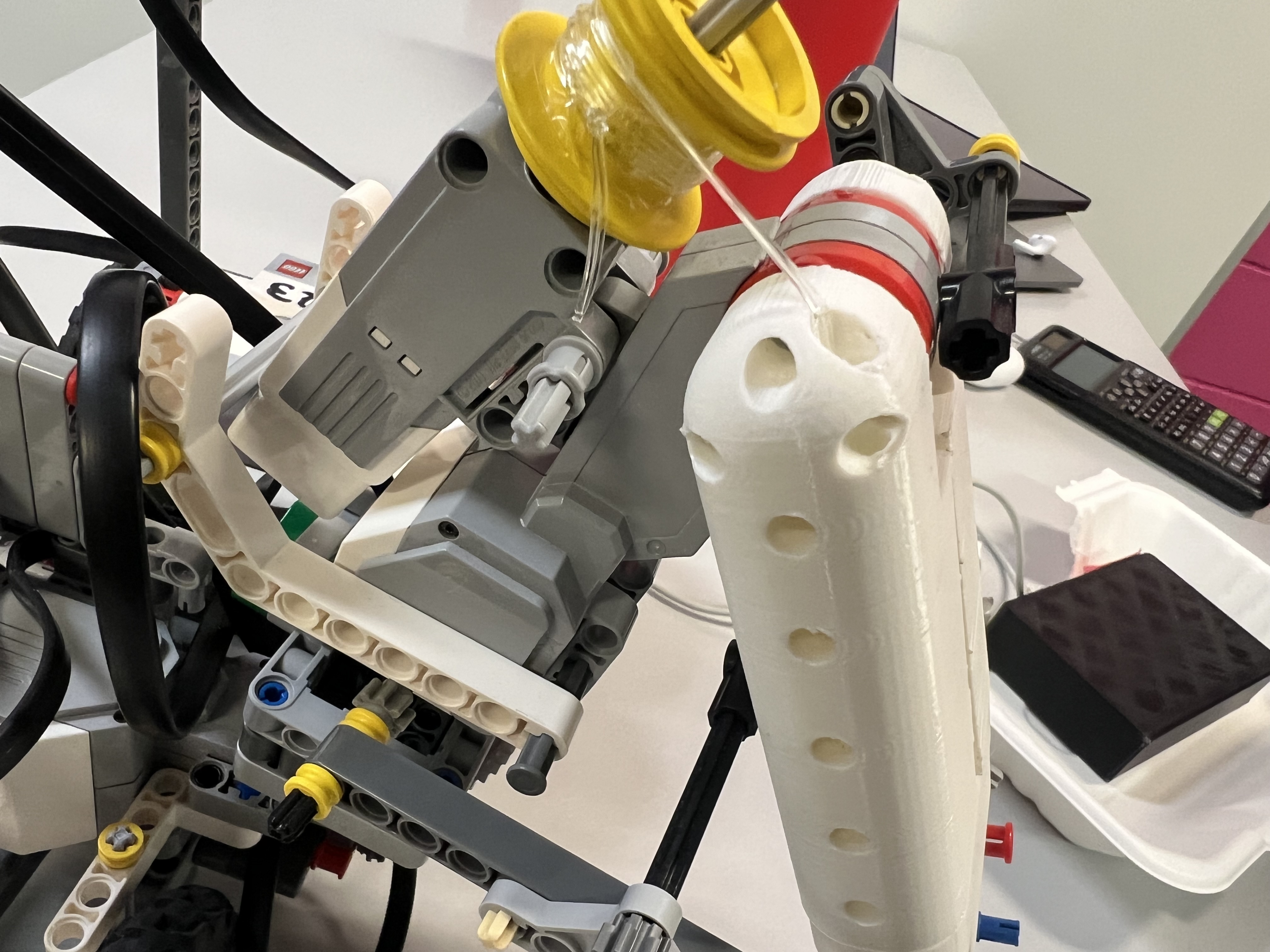
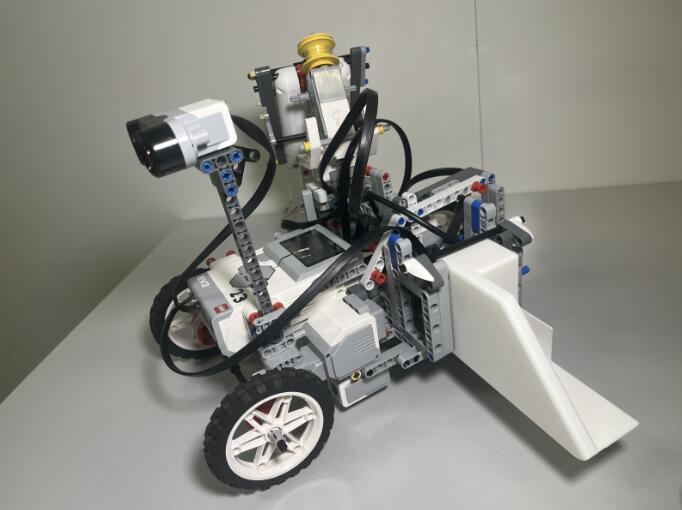
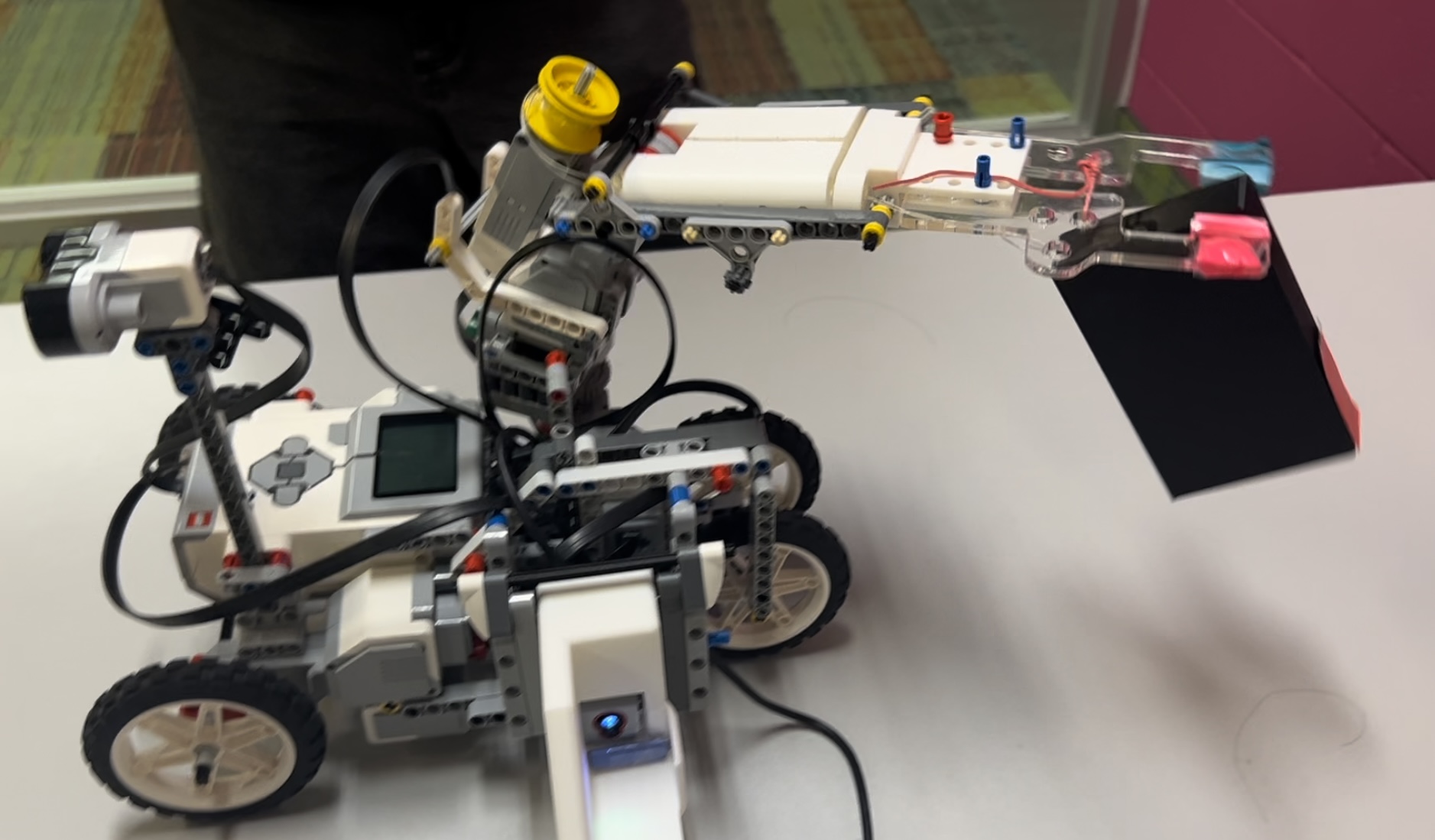
Developed the full mechanical system for an autonomous book-sorting robot, including a custom claw-and-arm mechanism designed with LEGO EV3 components, 3D-printed parts, and laser-cut acrylic grippers. Optimized the design for secure gripping and smooth movement, ensuring books could be consistently picked up, lifted, and placed into bins. Conducted iterative testing to refine grip strength, arm stability, and weight capacity, achieving reliable operation within the project constraints.
SOFTWARE AND CONTROL SYSTEMS
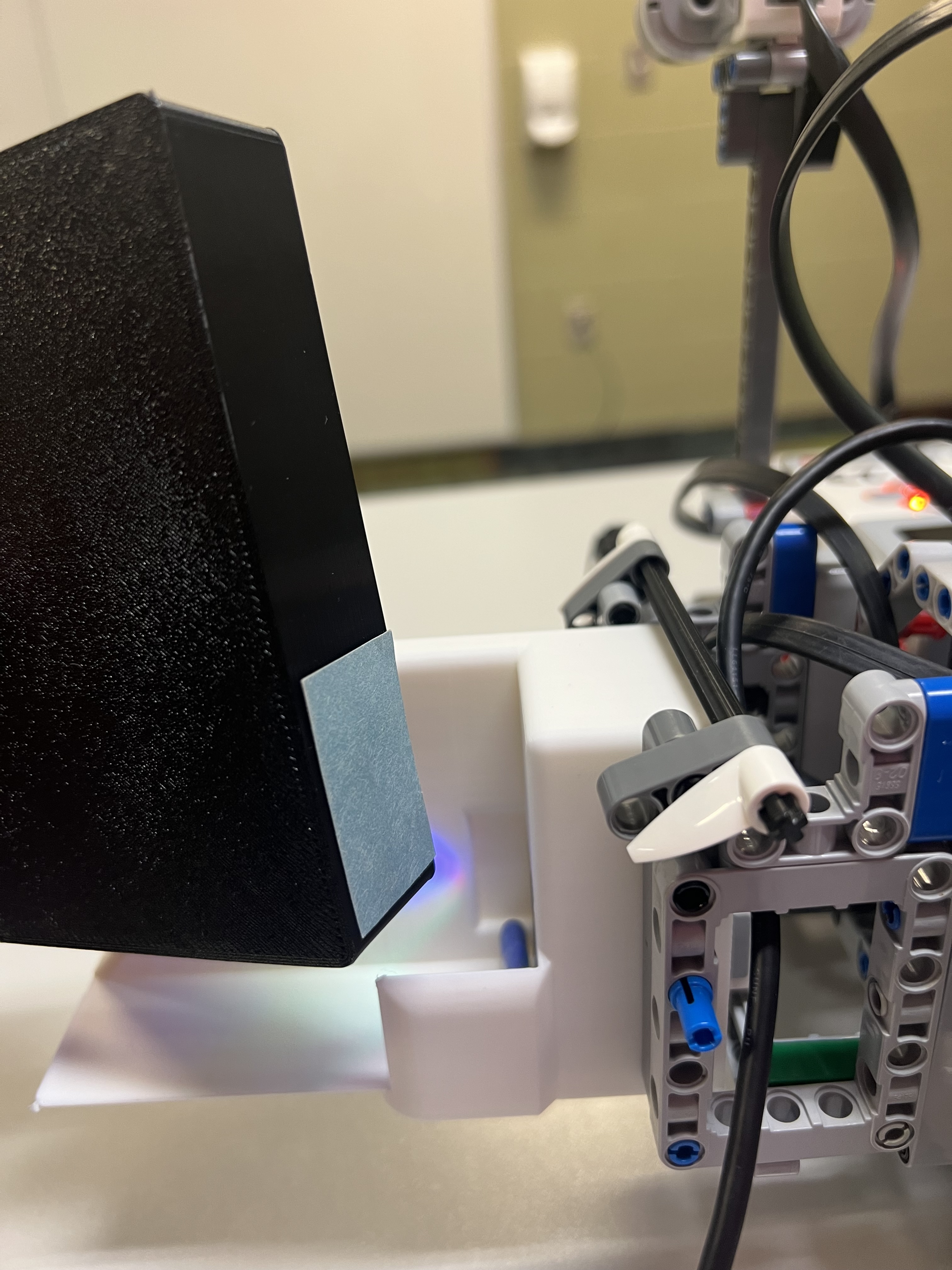
Programmed the robot using modular, function-based software to integrate multiple subsystems, including colour detection, obstacle avoidance, claw control, and coordinated arm movement. Prioritized precision over speed to account for motor encoder variability, ensuring repeatable performance across trials. Implemented safety protocols with ultrasonic sensors, allowing the robot to detect obstacles and adjust behaviour in real-time, enhancing reliability in public-use scenarios.
SYSTEMS INTEGRATION AND TESTING
Led verification and validation of the robot through structured experiments, including 15 colour-scanning trials, timed operation tests, weight lifting evaluations, and obstacle detection checks. Analyzed results against engineering specifications (≤45s operation, ≤$60 cost, ≤250g book weight) and confirmed compliance with all requirements. Coordinated integration of hardware and software systems, ensuring the robot operated autonomously with minimal user input while maintaining accuracy, safety, and efficiency.